Chapter 1: Introduction to Physical AI
Overview
This chapter introduces the fundamental concepts of Physical AI, bridging the gap between digital AI and the physical world.
Objectives
- Understand the definition and scope of Physical AI.
- Differentiate between Physical AI and traditional AI.
- Appreciate the challenges and opportunities in Physical AI.
Core Content
Physical AI, also known as Embodied AI, is a field of artificial intelligence that focuses on creating intelligent agents that can interact with the physical world through a body. Unlike traditional AI, which often exists purely in digital form (e.g., chess programs, language models), Physical AI systems have the ability to perceive their environment, reason about it, and perform actions that affect it. This interaction with the real world introduces a host of challenges not present in purely digital domains, such as sensor noise, actuator imprecision, and the need to operate safely around humans.
Key Concepts
- Embodiment: This is the foundational idea that an intelligent agent's body is not just a passive container but plays a crucial role in its cognitive processes. The shape, sensors, and actuators of a robot influence how it perceives the world and what it can learn. For example, a robot with wheels will learn to navigate differently than a robot with legs.
- Perception: This is the ability of an agent to gather information about its environment through sensors like cameras, LiDAR, tactile sensors, and microphones. Raw sensor data must be processed into a meaningful representation of the world that the agent can use for decision-making.
- Action: This is the ability of an agent to affect its environment through actuators such as motors, grippers, and wheels. Actions can range from simple movements like rotating a joint to complex behaviors like grasping an object or walking.
- Reasoning: This is the ability of an agent to make decisions and solve problems based on its perception and goals. This can involve planning a sequence of actions to achieve a goal, learning from experience to improve performance, or reasoning about the consequences of its actions.
Examples
- A humanoid robot learning to walk on uneven terrain.
- A self-driving car navigating a busy city street while obeying traffic laws.
- A robotic arm in a factory learning to assemble a product from a set of parts.
Figures
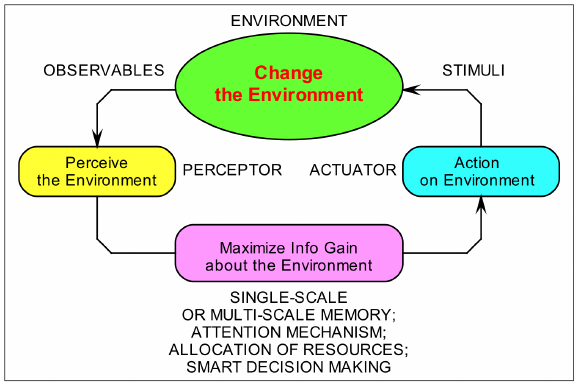
Figure 1: The Perception-Action Loop, illustrating how an agent perceives the state of the world, reasons about it, and takes an action, which in turn changes the state of the world.
Summary
This chapter introduced the core concepts of Physical AI, highlighting the importance of embodiment and the continuous cycle of perception, reasoning, and action. We differentiated Physical AI from traditional AI and explored some examples of its application in robotics and autonomous systems. The following chapters will build upon these foundational ideas to explore the specific technologies and techniques used to build intelligent physical agents.